15. Turtlesim Comms: Message Information
Turtlesim Comms: Message Information
Turtlesim Comms: Message Information
Turtlesim Comms: Show Message Information
Let’s get some more information about the
geometry_msgs/Twist
message on the
/turtle1/cmd_vel
topic, to do so, we will use the
rosmsg
info command.
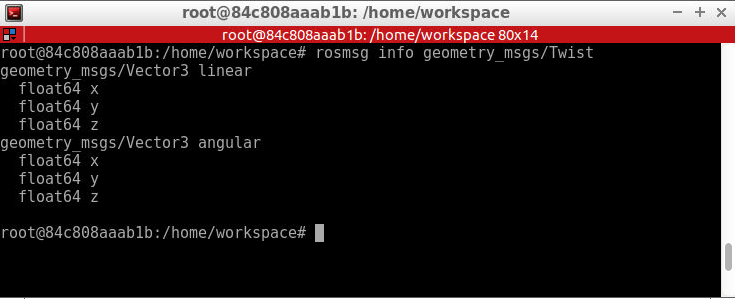
We can see that a
Twist
message consists nothing more than two
Vector3
messages. One for linear velocity, and another for angular velocity, with each velocity component (x,y,z) represented by a float64.
Note
Sometimes the message definition doesn’t provide an ample amount of detail about a message type. For instance, in the example above, how can we be sure that linear and angular vectors above refer to velocities, and not positions? One way to get more detail would be to look at the comments in the message’s definition file. To do so, we can issue the following command:
rosed geometry_msgs
Twist.msg
.
More information about
rosed
, including how to select which editor is used by default, can be found
here
.